Abstract
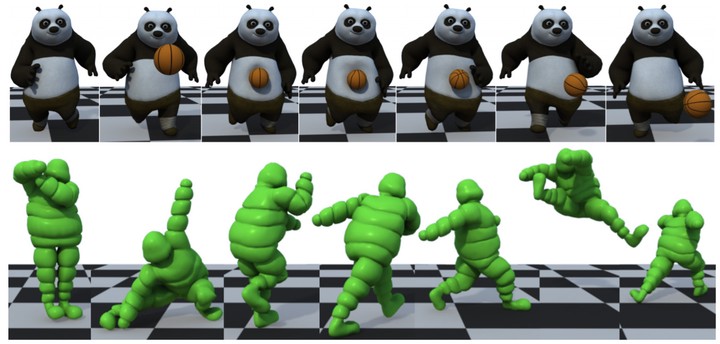
In this paper we present a physics-based framework for simulation and control of human-like skeleton-driven soft body characters. We couple the skeleton dynamics and the soft body dynamics to enable two-way interactions between the skeleton, the skin geometry, and the environment. We propose a novel pose-based plasticity model that extends the corotated linear elasticity model to achieve large skin deformation around joints. We further reconstruct controls from reference trajectories captured from human subjects by augmenting a sampling-based algorithm. We demonstrate the effectiveness of our framework by results not attainable with a simple combination of previous methods.
Type
Publication
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2013)