Quickly discover relevant content by
filtering publications.

This paper proposes a novel computational method for forward simulation and inverse design of magnetoelastic thin shells.
Xuwen Chen, Xingyu Ni, Bo Zhu, Bin Wang*, Baoquan Chen* (* corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2022)
We propose a novel numerical scheme to simulate interactions between a magnetic field and nonlinearly magnetized objects immersed in it.
Yuchen Sun^, Xingyu Ni^, Bo Zhu, Bin Wang*, Baoquan Chen* (^ equal contribution, * corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH ASIA 2021)

We present a tool that enables artists to synthesize camera motions following a learned camera behavior while enforcing user-designed keyframes as constraints along the sequence.
Hongda Jiang, Marc Christie, Xi Wang, Libin Liu, Bin Wang*, Baoquan Chen* (* corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH ASIA 2021)

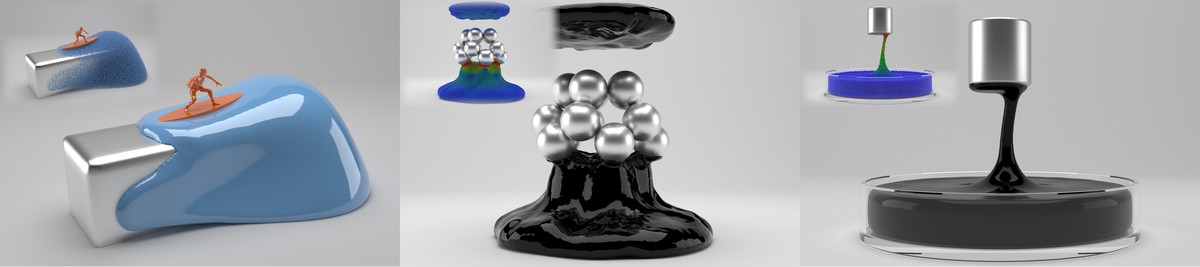
This paper proposes a novel three-way coupling framework to simulate the surface-tension-dominant contact between rigid and fluid, which using a Lagrangian surface membrane to handle the interactions between bodies and fluid.
Liangwang Ruan^, Jinyuan Liu^, Bo Zhu, Shinjiro Sueda, Bin Wang*, Baoquan Chen* (^ equal contribution, * corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2021)
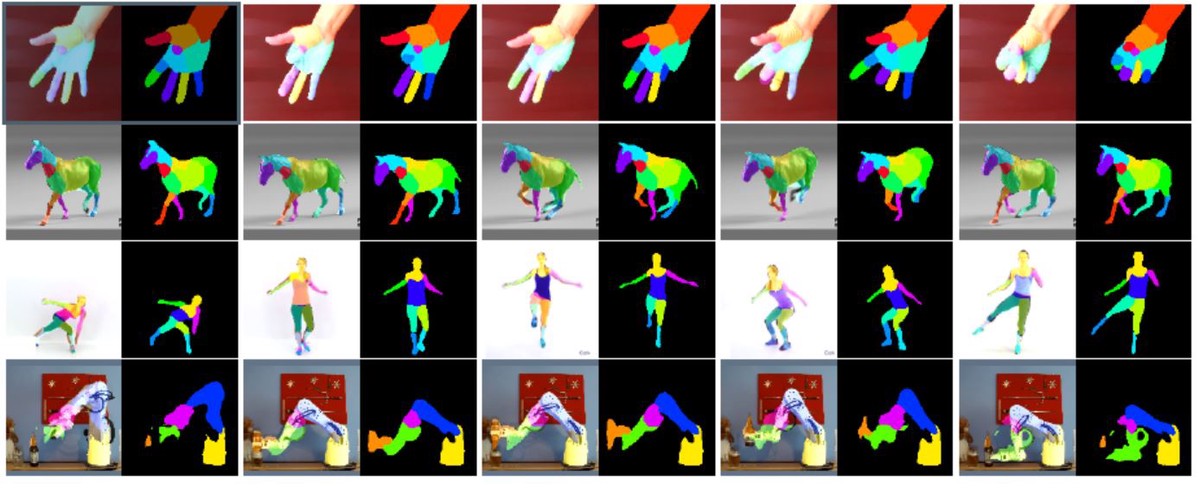
This paper proposes an unsupervised Co-part segmentation approach, which leverages shape correlation information between different frames in the video to achieve semantic part segmentation. We have designed a novel network structure which achieves self-supervision through a dual procedure of part-assembly to form a closed loop with part-segmentation. Additionally, we have developed several new loss functions that ensure consistent, compact and meaningful part segmentation and the intermediate transformations with clear explainable physical meaning.
Qingzhe Gao, Bin Wang, Libin Liu, Baoquan Chen
Proceedings of ICML 2021
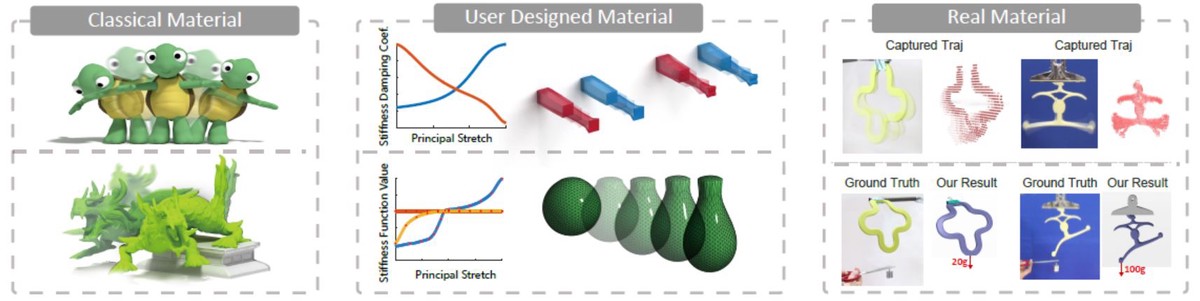
This paper presents a new method for estimating nonlinear constitutive models from trajectories of surface data. The key insight is to have a parametric material correction model learn the error of the elastic and damping properties of a nominal material.
Bin Wang^, Yuanmin Deng^, Paul Kry, Uri Ascher, Hui Huang, Baoquan Chen* (^ equal contribution, * corresponding author)
Proceedings of Pacific Graphics 2020
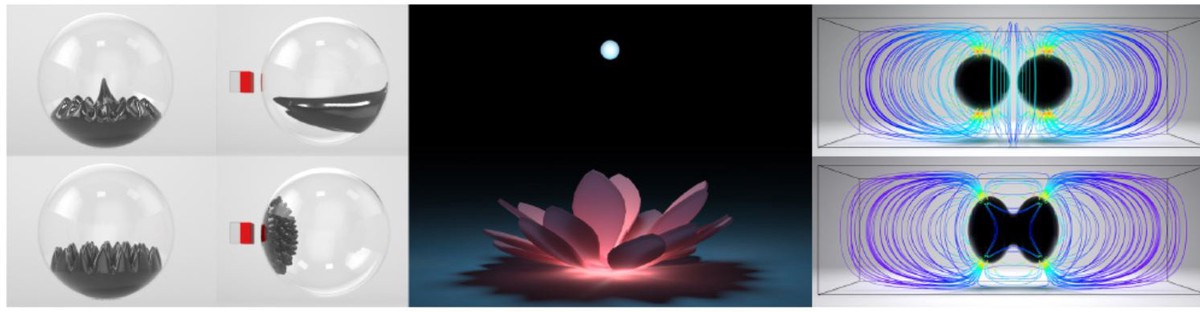
This paper presents a versatile, numerical approach to simulating various magnetic phenomena using a level-set method, which contains a novel two-way coupling mechanism between a magnetic field and magnetizable objects.
Xingyu Ni, Bo Zhu, Bin Wang*, Baoquan Chen* (* corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2020)
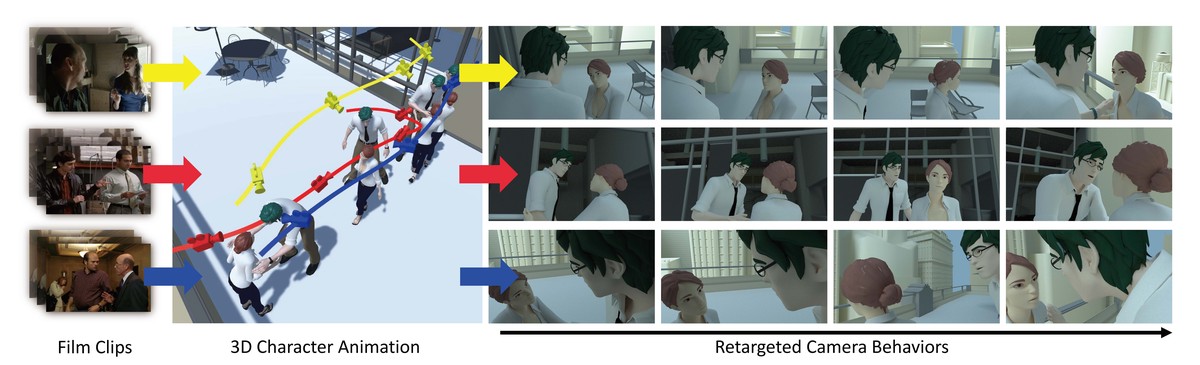
In this paper, we propose an example-driven camera controller which can extract camera behaviors from an example film clip and re-apply the extracted behaviors to a 3D animation, through learning from a collection of camera motions.
Hongda Jiang^, Bin Wang^, Xi Wang, Marc Christie, Baoquan Chen* (^ equal contribution, * corresponding author)
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2020)
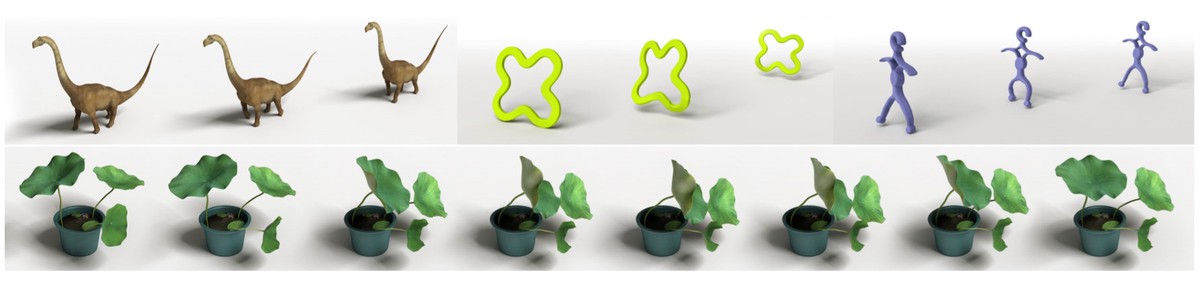
We present a data-driven method that can capture deformation of generic soft objects in high fidelity with low-cost depth sensors; and estimate plausible deformation parameters from these pure kinematic motion trajectories, without requiring any force-displacement measurements as is common in traditional methods. Using the learned deformation models, new motion and deformation can be synthesized at interactive rates to respond to dynamic perturbations or satisfy user-specified constraints.
Bin Wang , Longhua Wu , KangKang Yin, Uri Ascher, Libin Liu, Hui Huang
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2015)
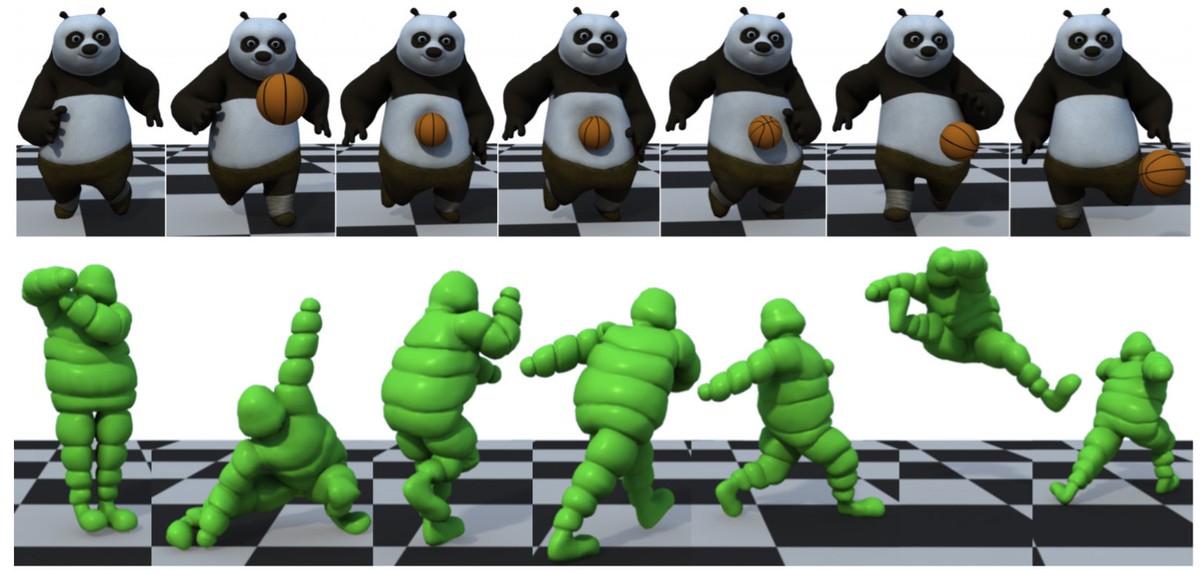
We have presented a two-way simulation and control framework for soft characters with inherent skeletons. We propose a novel pose-based plasticity model that extends the corotated linear elasticity model to achieve large skin deformation around joints. We further reconstruct controls from reference trajectories captured from human subjects by augmenting a sampling-based algorithm.
Libin Liu, Kangkang Yin, Bin Wang, Baining Guo
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2013)

The accuracy of intersection volume is important for plausible collision response. In this paper we have presented the first imagebased collision detection method that provides the controllability of intersection volume without explicit geometrical computation, and demonstrated its relevance for precise contact modeling. Its computation combines rasterization at moderate resolution with adaptive ray casting, which allows more precise contact modeling where needed and a reduced memory footprint
Bin Wang, François Faure, Dinesh K. Pai
ACM Transactions on Graphics (Proceedings of SIGGRAPH 2012)